De la Provocare Clinică la Soluție Tehnologică: Viitorul canulării venei retiniene este mai aproape decât credem
Microchirurgia retiniană se află într-un punct de inflexiune, iar una dintre cele mai promițătoare direcții este integrarea roboticii autonome în proceduri considerate până recent aproape imposibile din punct de vedere tehnic. Un studiu publicat în Science Robotics aduce în prim-plan o inovație cu potențial major pentru oftalmologie: canularea autonomă a venei retiniene, realizată cu ajutorul unui sistem robotic ghidat de inteligență artificială.
De ce este canularea venei retiniene o provocare majoră?
Canularea venei retiniene este una dintre cele mai dificile manevre din chirurgia oculară. Diametrul extrem de mic al vaselor, mișcările involuntare ale ochiului și sensibilitatea țesuturilor fac ca această procedură să fie limitată, în practica clinică, la foarte puțini chirurgi extrem de experimentați. Totuși, interesul pentru această tehnică este ridicat, deoarece permite livrarea locală, țintită, a unor clase de substanțe precum agenții trombolitici, direct în circulația retiniană, cu potențial impact asupra evoluției ocluziilor vasculare retiniene.
 Rolul roboticii autonome:
Rolul roboticii autonome:
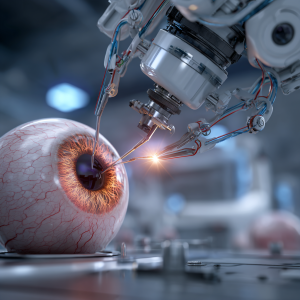
Studiul descrie dezvoltarea unui sistem robotic capabil să execute autonom pașii critici ai canulării venei retiniene. Spre deosebire de sistemele robotice clasice, care funcționează ca extensii ale mâinii chirurgului, acest sistem utilizează deep learning și computer vision pentru a identifica vena țintă, a ghida microacul și a detecta momentul exact al pătrunderii în lumenul vascular.
Un element-cheie este capacitatea robotului de a interpreta feedback-ul vizual în timp real. Algoritmii antrenați pot recunoaște modificări subtile ale peretelui vascular și ale fluxului, reducând riscul de perforație sau extravazare. Această abordare minimizează variabilitatea legată de experiența operatorului și deschide calea către standardizarea unei proceduri extrem de complexe.
 Date experimentale relevante:
Date experimentale relevante:
Rezultatele au fost obținute în modele ex vivo, folosind ochi de porc, un standard recunoscut pentru evaluarea tehnicilor retiniene. Sistemul robotic a demonstrat o rată de succes de până la 90% în realizarea canulării, cu o precizie și o consistență superioare abordărilor manuale raportate anterior în literatura de specialitate.
De asemenea, robotul a fost capabil să mențină poziția acului în interiorul venei pentru o perioadă controlată, un aspect esențial pentru administrarea sigură a claselor de substanțe terapeutice. Detectarea automată a contactului cu peretele vascular și a penetrării acestuia reprezintă un progres major față de tehnicile asistate exclusiv de feedback-ul vizual uman.
 Implicații clinice pentru oftalmologie
Implicații clinice pentru oftalmologie
Pentru medicii oftalmologi, aceste rezultate au implicații care depășesc simpla inovație tehnologică. În viitor, astfel de sisteme ar putea permite:
-
extinderea accesului la proceduri microvasculare retiniene complexe;
-
reducerea riscului operator și a dependenței de curba de învățare individuală;
-
administrarea locală, precisă, a unor clase de substanțe cu potențial terapeutic ridicat.
Este important de subliniat că studiul nu propune înlocuirea chirurgului, ci redefinirea rolului acestuia: de la executant al gesturilor fine la supervizor al unui sistem autonom extrem de precis.
Limite și pași următori
Autorii subliniază clar că rezultatele sunt obținute în condiții experimentale controlate. Trecerea către aplicații clinice va necesita validare suplimentară, adaptarea la variabilitatea anatomică umană și integrarea sigură în fluxul operator real. Cu toate acestea, baza tehnologică este solidă, iar direcția este clară.
Concluzie
Canularea autonomă a venei retiniene marchează un pas important spre oftalmologia de precizie asistată de inteligență artificială. Pentru specialiștii în retina medicală și chirurgicală, această tehnologie ridică întrebări esențiale despre viitorul tratamentului ocluziilor vasculare și despre modul în care robotica autonomă poate deveni un aliat clinic real.